 par
par OpenMower est un projet Open Source qui a pour but de transformer un robot tondeuse existant en un robot intelligent et précis. Plus besoin de fils périmétrique, car nous allons pouvoir tracer virtuellement nos zones grâce à la précision en cm de la carte GPS RTK.
Tous les détails se trouvant sur le site OpenMower.de et aussi sur ma chaine Youtube ArminasTV . En effet je vais me charger de faire une traduction de la documentation OpenMower ainsi que la retranscription de mon expérience dans ce blog.
Acquisition du matériel pour la réalisation du projet
| Matériel | TTC + fdl | Site |
|---|---|---|
| Robot Yard Classic 500B, dispo en commande | 269 € | Site FR |
| Carte GPS RTK | 207 € | ArduSimple |
| Antenne BT 560 (en promo parfois) | 25 € | Aliexpress |
| Support de la BT 560 | 10 € | Aliexpress |
| Raspberry Pi 4 | 60 € | Site reichelt |
| STLINK | Aliexpress | |
| Convertisseur DC CC Max Ardu37XL4016 | Aliexpress | |
| MPU 6050 | Aliexpress | |
| Cable JST 9P, 20cm | Aliexpress | |
| Cable JST 4P, 20cm | Aliexpress | |
| Cable ATX | Aliexpress |
Attention !!!
Toutes manipulations doivent être réalisé avec l’alimentation débranché
Enlever bien les lames pour éviter un éventuel accident.
Pour éviter de griller un composant de votre tondeuse, l’utilisation d’un multimètre ( comme celui-ci ) est fortement recommandé afin de bien tester le voltage à chaque étape et surtout au niveau du DCDC !!!
Démonter la tondeuse
Vous avez un article très bien réalisé sur le site Openmower ici. Mais vous avez aussi la très bonne vidéo du créateur d’Openmower ici.
Pour éviter les bips du système d’urgence lors du démarrage de Mowgli, éviter de débrancher les connecteurs du capot.
Schéma de la carte mère du Yard Classic
L’image a été trouvé dans le Discord OpenMower (lien d’invitation) au salon mowgli-builds publié par prisukamas. Voici le lien d’origine
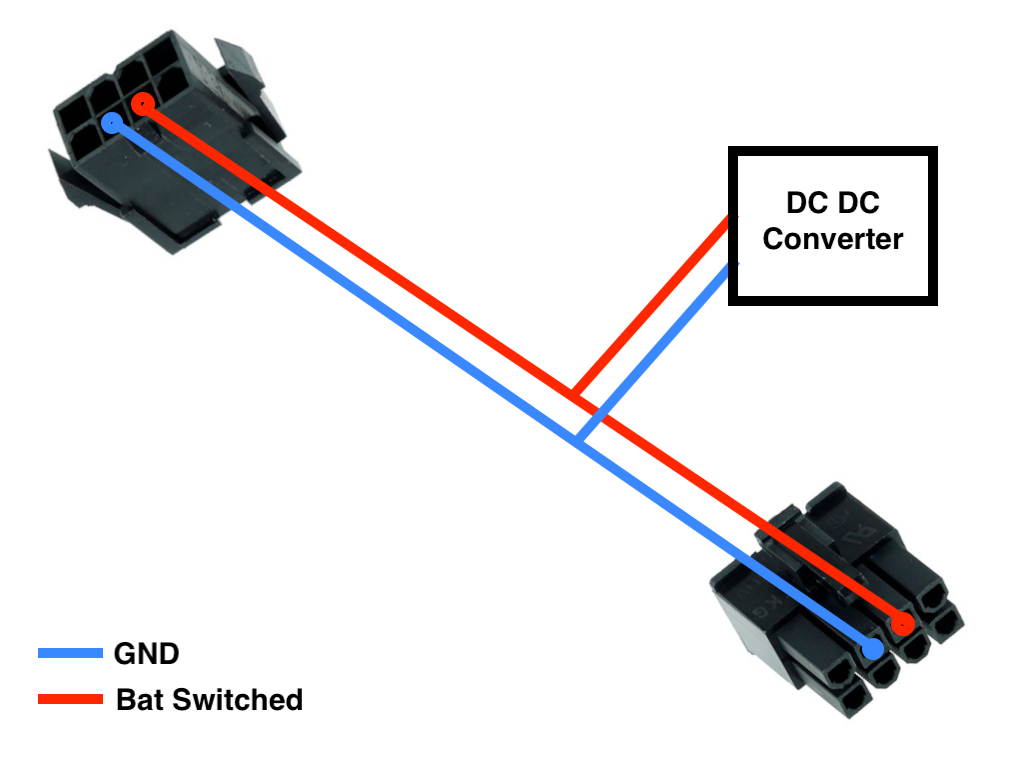
Cependant je n’ai pas suivi ce branchement pour le DCDC.
Pour la partie alimentation du Raspberry PI, j’ai suivi ce schéma ici . Le convertisseur DCDC doit être réglé à 5V en sortir !
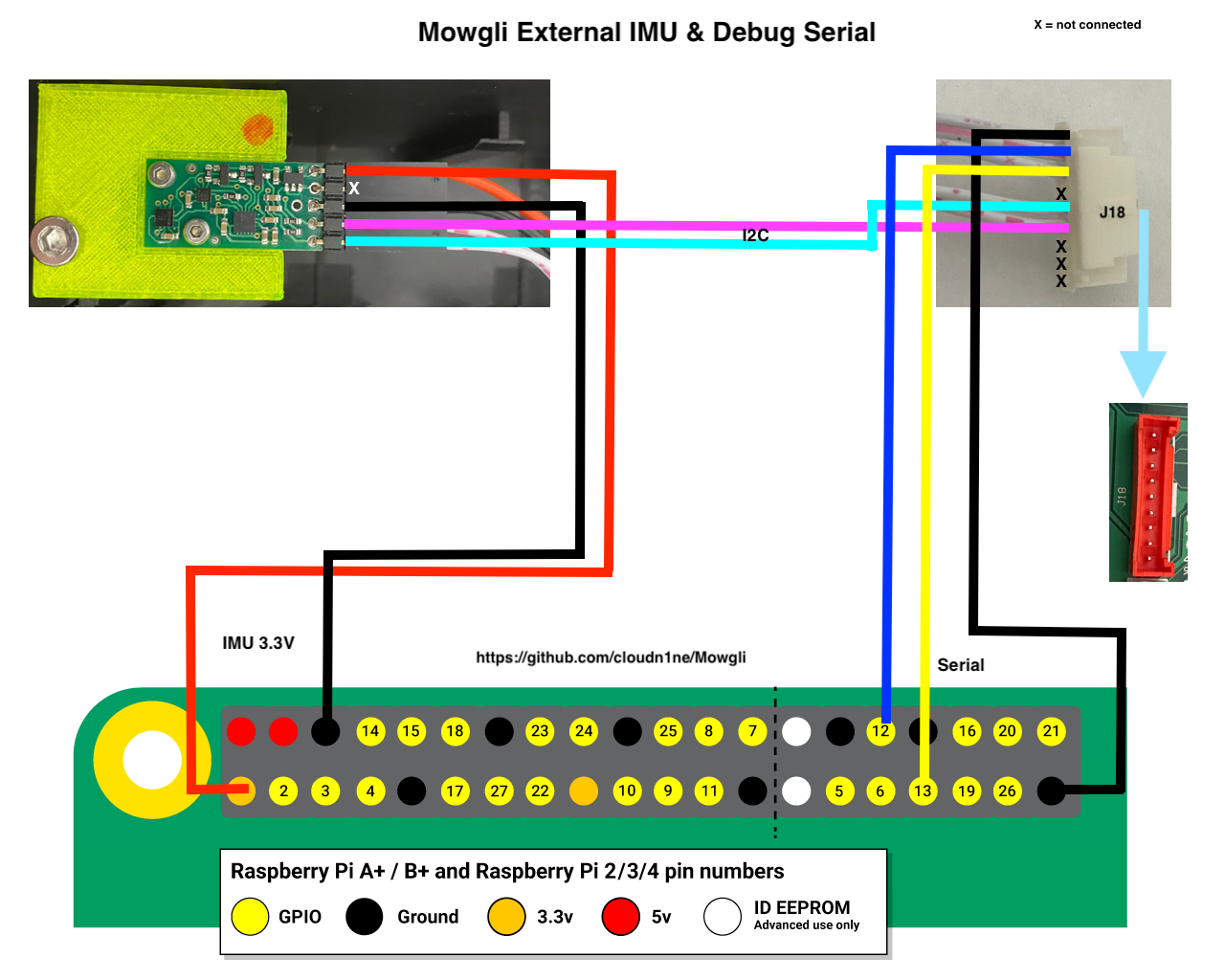
Vous avez aussi ce schéma ici pour le branchement de l’IMU avec le Raspberry et la carte mére de la tondeuse.
Les différents connecteurs de la carte mère (image ici)
- La version de la CM
- La puce STM qui recevra le firmware Mowgli par le connecteur J9
- J9 => Branché le STLINK pour uploader le firmware Mowgli
- Interface USB Type A pour que le Raspberry communique avec Mowgli
- J18 => Branchement pour l’IMU et le UART du Raspberry
- Cable ATX pour l’alimentation de la CM mais pour notre cas le Raspberry à travers le convertisseur DCDC
Backup du firmware (TODO)
Uploader le firmware Mowgli
Pré-requis : Il faut les applications git, VS Code et son extension PlatformIO IDE.
A faire qu’un seul fois avec un pc Windows et donc votre clef STM connecté à ce même PC !
Lien du projet firmware Mowgli : https://github.com/cedbossneo/Mowgli .
Attention : A ma connaissance, il existe de 2 versions de la CM avec la puce STM32 qui est différente. En principe, si vous avez acheté le robot neuf dans un site e-commerce, il y a une forte chance que la version de la puce soit la STM32F04.
1. Dans un répertoire, lancer la commande git clone en fonction de la version de votre carte mère tondeuse :
- STM32F01 =>
git clone https://github.com/cedbossneo/Mowgli - STM32F04 =>
git clone -b 500b https://github.com/cedbossneo/Mowgli
2. Dans VS Code, il faut ajouter directement le répertoire [Votre répertoire]/Mowgli/stm32/ros_usbnode pour qu’il soit bien reconnu par PlatformIO, faites Open Folder pour cela.
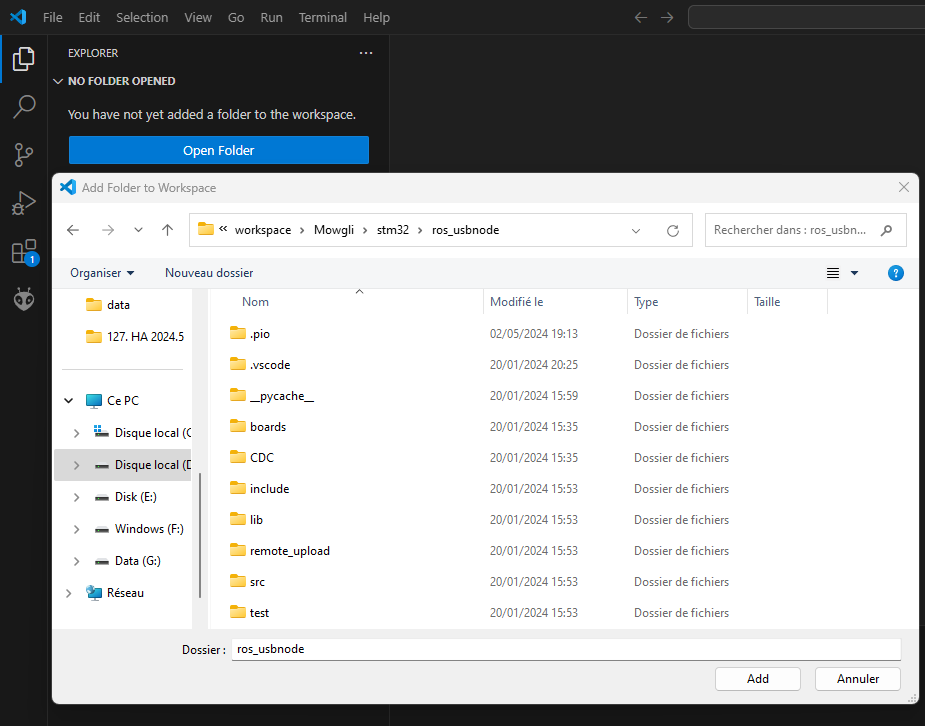
3. Vous devriez avoir ces icônes en base de VS Code quand PlatformIO aura fini son analyse.

4. Cliquer que l’icône “Default (ros_usbnode)” pour faire le popup ci-dessous. Et sélectionner l’environnement voulu.

5. Ensuite vous pouvez cliquer sur l’icone Build puis l’icone Upload pour transférer le firmware


6. Vous pouvez éteindre et allumer la CM de la tondeuse passer à l’étape suivante.
Si vous aviez débranché les connecteurs du capot, vous devriez entendre les bips du système d’urgence.
Installation de la solution Openmower
Toutes les commandes sont à faire sur le Raspberry PI en ssh avec Putty par exemple. La configuration choisie est le All-in-One, c’est-à-dire que tout se trouve sur le Raspberry. Le créateur du projet a prévu de pourvoir externaliser le projet Openmower. Mais je ne le traite pas ici.
Prévoir une carte SD d’au moins de 16Go de stockage !
Fixer l’IP de votre raspberry PI pour éviter des problèmes plus tard.
- Installation de doker et git :
sudo apt-get install git vim
curl https://get.docker.com | sh - Création du fichier de config udev “/etc/udev/rules.d/50-mowgli.rules”
SUBSYSTEM=="tty" ATTRS{product}=="Mowgli", SYMLINK+="mowgli"
#simpleRTK USB
SUBSYSTEM=="tty" ATTRS{idVendor}=="1546" ATTRS{idProduct}=="01a9", SYMLINK+="gps"
#ESP USB CDC - RTK1010Board
SUBSYSTEM=="tty" ATTRS{idVendor}=="303a" ATTRS{idProduct}=="4001", SYMLINK+="gps" - On récupère le code pour la génération des containers dans docker :
git clone https://github.com/cedbossneo/mowgli-docker - Il faut renseigner l’adresse IP de votre Raspberry dans le fichier .env se trouvant dans le répertoire
mowgli-docker - Lancer la création des containers Docker
sudo docker compose up -d
L’interface graphique Mowgli est hébergée sur le port 4006 de votre PI.
L’application Web OpenMower est hébergée sur le port 4005 de votre PI.
Le GPS RTK
Ensuite il faut configurer votre carte GPS correctement et vous avez un bon article à suivre sur Openmower ici.
Configuration dans Openmower
Il faut penser à mettre un ntrip pour la base RTK la plus proche de chez vous. (réseau libre Centipéde)
Les petites astuces
Pour arrêter les containers docker, à faire dans le répertoire mowgli-docker :sudo docker compose down
Pour démarrer les containers docker, à faire dans le répertoire mowgli-docker :sudo docker compose up -d
Il arrive parfois d’avoir des problèmes avec les enregistrements de zones. Il suffit de supprimer le fichier map.bag dans le répertoire mowgli-docker/ros/map.bag
Le lien pour ajouter des crampons aux roues à imprimer en 3D : ICI
Les liens utiles
Site OpenMower : https://openmower.de/
Discord OpenMower : https://discord.gg/gdaD5EnH
Groupe Telegram FR : https://t.me/c/1744099999/1
Si le contenu vous intéresse, n'hésitez pas à vous abonner à ma chaine et à partager sur tous vos réseaux sociaux. 👍



{kind=link}
{kind=link}
{kind=link}
Salut, merci pour toutes ces infos, tu m’as évité le changement de carte mère du 500B !
Petite question : ton jardin est totalement couvert par le WIFI ? Au point le plus loin du jardin mon robot se trouvera à 50m du point d’acces WIFI, qui est déjà derriere des murs de 50cm … Autant dire que ça va être tendu le WIFI jusque là !
Merci pour ton travail !
Bonjour merci pour le commentaire.
J’ai ajouté un répéteur de ce type https://amzn.to/3Yk9o6o
Il me prolonge de 30m la porté de mon wifi ce qui me suffit. Par contre 50m pour vous, cela risque d’être compliqué
Merci ! Je vais mettre un point d’acces externe, ça fera le travail.
Pour info sur le Discord d’Openmower, les gens m’ont dit que le facteur limitant allait certainment être l’antenne du Pi4 qui est très limitée. Le mieux est de remplacer le Wifi de la carte par celui d’un dongle avec une vraie antenne. Certains ont réussi à faire passer un signal en ligne de vue directe (pas de mur par exemple) sur 60m. C’est encourageant !
Bonjour,
Je cherche à connaître la consommation en heure pleines et creuse via mes appareils zigbee qui remonte la consommation et le retour. Avez-vous un moyen de faire cela sans compteur linky?